☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
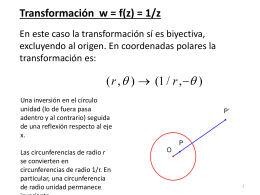
2. Funciones
complemento clase 3 numeros complejos 2
Estrategias de intervención para la atención de alumnos con N.E.E
2. Funciones
famosos en jaque
Equipos de Trabajos Eficaces
Límite de una sucesión
Jueves 22 de febrero
Trigonometría del círculo unitario
Diapositiva 1
Ilusiones ópticas
límite al infinito
Continuidad deFunciones
Descarga
CÁLCULO DE ÁREAS
todos los círculos
El número Π
Círculo Podemos LH procesos municip
Circulo del Odio
La Integral Definida
File
HARE KRISHNA HARE KRISHNA KRISHNA KRISHNA HARE