☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
2. Funciones
2. Funciones
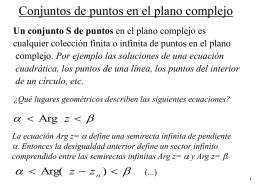
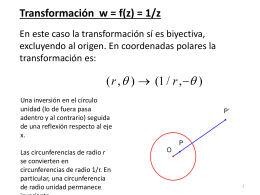
complemento clase 3 numeros complejos 2
Diapositiva 1
ENTRADAS
famosos en jaque
Teoria
Límite de una sucesión
Energía y de potencia de la señales
Jueves 22 de febrero
Diapositiva 1