☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Técnicas Supervisadas Aproximación no paramétrica
sss
Ideas que valen $us 10,000
Document
Diapositiva 1
Tema 3:
Límite de una sucesión
Jueves 22 de febrero
Diapositiva 1
Continuidad deFunciones
límite al infinito
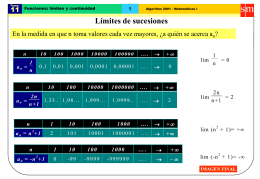
Tema 11. Funciones: Límites y continuidad
File
Ingeniería en Sistemas de Información
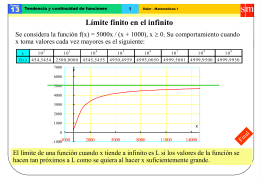
Tendencia y continuidad
RECLUTAMIENTO DE PERSONAL - ITCh DEPI
Asíntotas
limites y continuidad
Reconocimiento de Caras con información local
Semántica Léxica
Historia de la Computación - Departamento de Ingeniería de
El Nro que Ud. necesita para crecer