☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Análisis de error en estado estacionario
CRECIMIENTO Y DESARROLLO ECONÓMICO
Platica
El modelo economico de Solow (parte II)
sys-1
Respuesta de 2º orden y Error
AUTOMATISMOS Y CONTROL
PPT Pensar sin Estado - Facultad de Trabajo Social
CONTROL ANALOGO ING. JAVIER EDUARDO MARTINEZ …
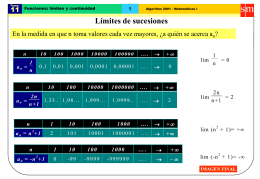
Límite de una sucesión
Jueves 22 de febrero
"Eres importante para mí".
Presentazione di PowerPoint
Continuidad deFunciones
límite al infinito
Ecuación - Ecuaciones Diferenciales con Maple
Introducción a los sistemas de control
Tema 11. Funciones: Límites y continuidad
Sistemas de segundo orden
EL MÉTODO DE KUHN
Desarrollo Local La importancia de su promoción
P1-mA-loop-Champions-final
Práctica_4