☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Respuesta de 2º orden y Error
Sistemas de control TI-2233
El crecimiento económico: Acumulación y progreso técnico
CRECIMIENTO Y DESARROLLO ECONÓMICO
El modelo economico de Solow (parte II)
Platica
Todos vamos cambiando de nivel
Análisis de error en estado estacionario
Sistemas de segundo orden
Entradas Analógicas
Flujos de capital y apreciacion del tipo de cambio real
REDES NEURONALES
Entradas FF Sincrónicas y Asincrónicas
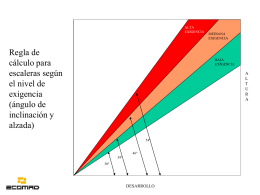
BASES PARA LA FABRICACION DE ESCALERAS FIJAS
Responsabilidades del gerente del proyecto
Hoja de cálculo
CASOS DE PRUEBA1
Mesa AMF Toda la vida se ha hecho así…
Ecuación - Ecuaciones Diferenciales con Maple
Estimación por Puntos de Función
ORGANIZACIÓN Y ENTORNO
Introduction to Time Series Analysis
PRINCIPIOS GENERALES DEL CONTROL DE SÍNTOMAS EN