☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Sistemas de segundo orden
resolución de ejercicios
TRAZAS - Bienvenidos a Clases
Métodos de Integración
V m
Ley de senos y cosenos
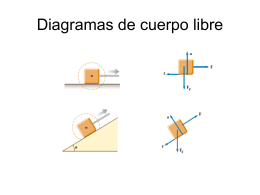
Diagramas de cuerpo libre
no homogenea. - utp-ing.industrial iii
Movimiento Armónico Simple
R - Universidad de Alicante
Diapositiva 1
calcern
ITERACIÓN SIMPLE DE PUNTO FIJO
www.economistas.es
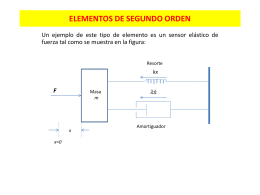
ELEMENTOS DE SEGUNDO ORDEN
Descarga
Sistemas de primer orden
Regla de la cadena PPT.
Coordenadas Polares MAT022
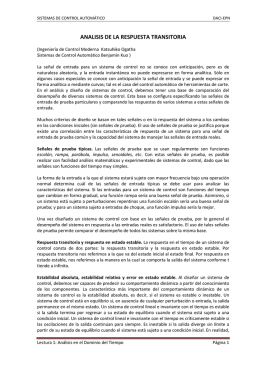
ANALISIS DE LA RESPUESTA TRANSITORIA
Sesión 11
PPT - Aprende Matemáticas
La Integral Definida