☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Sistemas de primer orden
Simulación de un motor CD.
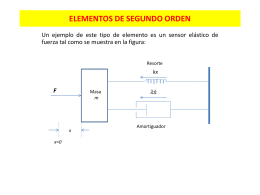
ELEMENTOS DE SEGUNDO ORDEN
introducción
ANALISIS DE RESPUESTA USANDO MATLAB
Aplicación de la transformada de Laplace en el cálculo de circuitos
Teoria de Control
Slide 1
Aplicando la Transformada de Laplace a Redes Eléctricas
Función Escalón ó mayor Entero
Aplicación de la Transformada de Laplace para la resolución de
Introducción a los sistemas de control
Solución de problemas en circuitos eléctricos por
Aplicaciones reales de la transformada de Laplace
Aplicaciones reales de la transformada de Laplace
Aplicaciones reales de la transformada de Laplace
Aplicación de la Transformada de Laplace en el análisis de circuitos
Diapositiva 1
Mejora de los modelos de Temperatura, Fuerza, Par y …
Transformada de Laplace
Sistemas de segundo orden
Representación en espacio de estado
Transformadas de Laplace. Funciones de