☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
ecdif
Sistemas de segundo orden
ITERACIÓN SIMPLE DE PUNTO FIJO
Sesión 11
Descarga
cálculo de órbitas
Clase 71: Demostración de Identidades
Diapositiva 1
2 MECÁNICA DEL CORTE DE METALES
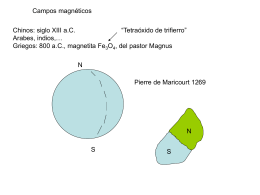
Campos magnéticos
Resumen del Proyecto
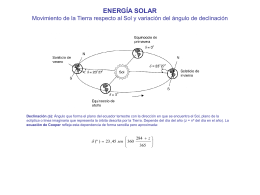
energía solar
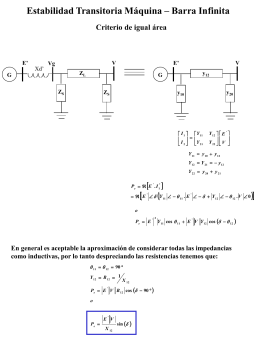
7 Criterio igual área
Preparaduria Nº 3 (Temas Nº 5)