☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Cámara y luces
Coordenadas cromaticas
COLEGIO DE INGENIEROS DEL PERÚ CONSEJO
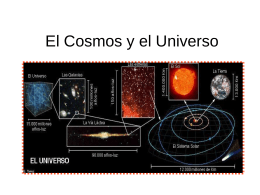
El Cosmos y el Universo
cortezpresentacion
Usando coordenadas para encontrar el tesoro
cinematica
Presentación de PowerPoint
Escalogramas multidimensionales
plano crtesiano - matematicasintermedias
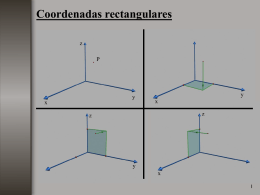
COORDENADAS CARTESIANAS
Document
Localización de Planta
Resultados OSINERGMIN Marañon w
El planeta Tierra
Planos en 3D
Document
Coordenadas cilíndricas
Presentación de PowerPoint
Tipos de articulaciones
Presentación de PowerPoint
análisis matemático para calcular la distancia promedio de arrastre