☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Presentación de PowerPoint
cortezpresentacion
Document
Bioestadística - Universidad de Málaga
Desarrollo de una herramienta multimedia en Internet para el
4.la cartografia de gabinete s.xvi-xvii
Presentación de PowerPoint
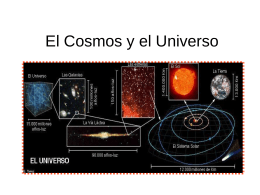
El Cosmos y el Universo
SIG_GRAL
Proyecto Mitch-Clearinghouse
comprensión, recuerdo e ideología. un estudio sobre el efecto
PPT
Cámara y luces
Escalogramas multidimensionales