☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Tipos de articulaciones
Los robots - JUANA
Ponencia
ROBOT
Mobile Robots - Carnegie Mellon University
Los robots y las personas
clase01-v2
clase01-v4
Retrato
ROBOTS - ieRed
Tilte Subtitle
robot
TEMA 1: INTRODUCCIÓN
Prótesis Robóticas
Robótica 1a Clase
PROTESIS DE BRAZO BIOMEDICO
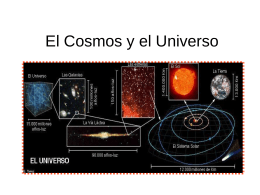
El Cosmos y el Universo
presentación
Cámara y luces