☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Complementos de procesado de la señal y Comunicaciones
El ritmo musical.
Tema 2: El ritmo
clase 2 - WordPress.com
Técnicas de Modulación Analógicas – Parte 3 – Mod. PULSOS
Mod en Pulso
ITERACIÓN SIMPLE DE PUNTO FIJO
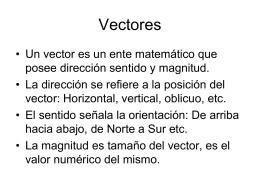
Representación gráfica de vectores
Clasificación tipográfica
Presión arterial y pulsos arteriales y venosos
frecuencia cardíaca (pulso)
Universidad Nacional Autónoma de México Facultad de Ingeniería
tutorial1_3
tema5
Sitios para tomar el pulso El pulso se puede tomar en cualquier
Sistemas de segundo orden
Calidad en el Sector Salud en Costa Rica
Modulación de Amplitud
Diapositiva 1
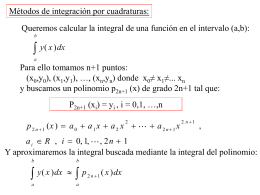
cuadraturas
Soluciones de Programación: Sensores Espera-por
fisica2byg_20
Búsqueda y ordenación