☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Deportes
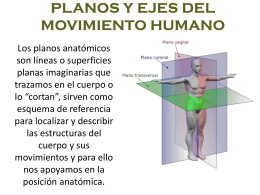
MOVIMIENTO
MOVIMIENTO - edufisicamario
Tema 0 Generalidades. 1112
Geometría del Movimiento de las Placas
MOVIMIENTO Y POSTURA MOVIMIENTOS - E
Parto_Modalidad_Vertice_ppt.
maquinas-y-herramientas1
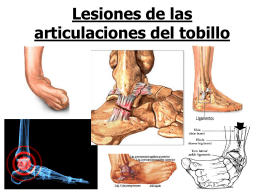
Lesiones de las articulaciones del tobillo
Palancas de Control Robert Simons Harvard Business School
Document
Planos
Diapositiva 1 - Pastos
Lo podemos solucionar - FMVZ-UNAM
Planos en 3D
Momento de Torsión (TORCA) y Equilibrio Rotacional
Léxico cinematográfico: ¡A ver! si te acuerdas… asocia las
15- Morfotipos de los miembros inferiores - lerat
Diagnóstico Punto de venta
El espacio y el tiempo - Isaac Newton Universidad Nacional de
MOMENTOS DE INERECIA
Estructura del Plan de Carrera
Análisis de la situación financiera a corto y a largo plazo
Módulo de Entrenamiento Deportivo