☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Deportes
MOVIMIENTO Y POSTURA MOVIMIENTOS - E
PALANCAS - WordPress.com
Historia de las Palancas
Unidad 1 - E-ducativa catedu
PALANCAS MUSCULARES - IHMC Public Cmaps (3)
Como funcionan las cosas hecho
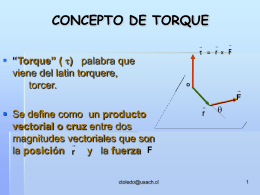
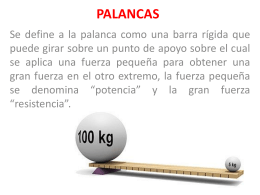
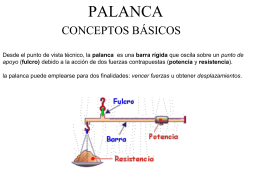
PALANCA
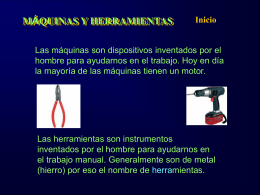
maquinas-y-herramientas1
Tipos de palanca - RecursosEDTecnologica
Descarga
Diseño de brazo robotico
Momento de Torsión (TORCA) y Equilibrio Rotacional
MOVIMIENTO
Prótesis Robóticas
Palancas de Control Robert Simons Harvard Business School
MAQUINAS SIMPLES Y COMPUESTA
Coples de Desconexion en Seco Estilo Leva y Ranura
Cursos Disponibles Dr. Willy H. Gerber
Mecanismos Simples[1]. - educacion-tecnologica
planeación estrategica de recursos humanos
Power Palanca
acoples desconexion en seco ii




![Mecanismos Simples[1]. - educacion-tecnologica](http://s1.slideshowes.com/store/data/000030321_1-741c5fb1bc7017d9fae49ce0796df2c2-260x520.png)