☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Estabilidad y Lugar Geométrico de las Raíces
Sistemas Lineales y Simulación (SLS5201)
Diapositiva 1
cal
Aproximacion de Funciones
Presentación de PowerPoint
Separación de raíces
Clase05 - WordPress.com
Lugar de las raíces
Análisis de error en estado estacionario
Desarrollo Local La importancia de su promoción
06 Polinomios
Razones de inversión
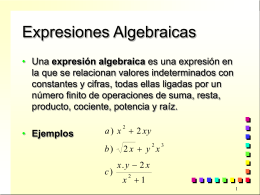
Expresiones Algebraicas
RAÍCES DE ECUACIONES