☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
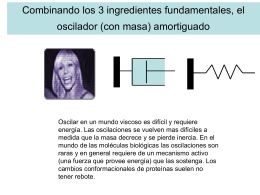
oscilador forzado amortiguado
Diapositiva 1
ei_ 2011_cierre oscilaciones
ESTRUCTURAS, OSCILACIONES Y NUMEROS COMPLEJOS
ITERACIÓN SIMPLE DE PUNTO FIJO
Vidas Móviles - Pontificia Universidad Javeriana
Presentación de Flujo Eléctrico en
ppt
tutorial1_3
Trigonometría del círculo unitario
15 Trabajo y Energía
+q - Universidad Nacional Experimental del Táchira
b-ecs-dif-modif - Electrónica
Práctica_4