☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Diapositiva 1
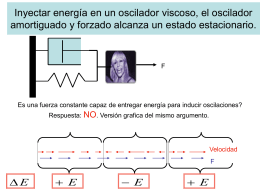
oscilador forzado amortiguado
ei_ 2011_cierre oscilaciones
ESTRUCTURAS, OSCILACIONES Y NUMEROS COMPLEJOS
Diapositiva 1
Diapositiva 1 - BIOESTADISTICO
clase4 - WordPress.com
EL APARATO CIRCULATORIO
Document
Fuente de poder
Presentación de PowerPoint