☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Document
resolución de ejercicios
Métodos de Integración
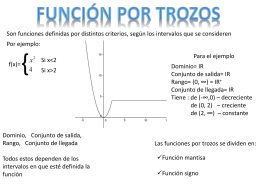
Función por trozos
Diapositiva 1 - Universidad de Antofagasta
MÁQUINAS. CONCEPTOS
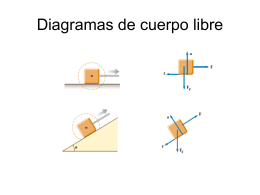
Diagramas de cuerpo libre
Seismology – G-GAP
ITERACIÓN SIMPLE DE PUNTO FIJO
no homogenea. - utp-ing.industrial iii
Diapositiva 1