☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
PROTESIS DE BRAZO BIOMEDICO
Mi amigo – el monstruo
De la autonomía al propósito
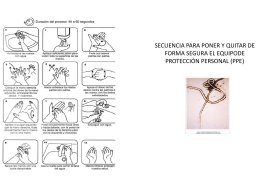
Postura de Guantes.
PRESENTACION F
Ejercicio Go/No go - José Eugenio Ortega
calentamiento de manos y dedos
PPT - jmcprl
ROBOT
Descarga
¿DE QUIÉN ES…?
Conferencia sobre Apriete
PUNTOS TONIFICANTES
ROPA INTELIGENTE (1)
Prótesis Robóticas
Ropa y lavado de manos
LECTURA RAPIDA
Musculos del miembro inferior - diana-ruiz
TEMA 1: INTRODUCCIÓN
Tipos de articulaciones
Pulse aquí para descargar la presentación
barakatemus compañía titirila - CoacH en Educación y Valores
Soluciones de Programación: Sensores Espera-por