☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Sistemas continuos
ESTILO III
Sistemas de primer orden
Sistemas continuos
Reglamento ROC
Teoria de Control
E-learning Integral - Galileo Educational System
Aplicaciones reales de la transformada de Laplace
Introducción a los sistemas de control
Solución de problemas en circuitos eléctricos por
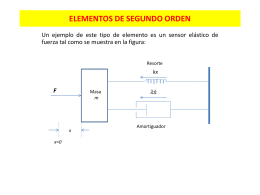
ELEMENTOS DE SEGUNDO ORDEN
ANALISIS DE RESPUESTA USANDO MATLAB