☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Capítulo 3 - Presentación "Máquina Síncrona"
ITERACIÓN SIMPLE DE PUNTO FIJO
“Tras las huellas de Darwin” CAMPAMENTO CIENTÍFICO
Sistemas de segundo orden
Julian Martín
cálculo de órbitas
tutorial1_3
Diapositiva 1
2 MECÁNICA DEL CORTE DE METALES
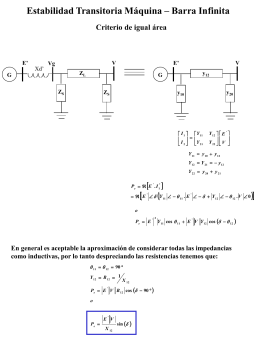
7 Criterio igual área
fisica2byg_20
Tiro Parabólico - Gobierno de Canarias