☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
TRANSFORMACIONES LINEALES EN 3D
El Cosmos y el Universo
Movimientos en el plano
TEMA 9 - matematicasdp
movimientos de la tierra
"folleto"
Diapositiva 1
Clase 5-1(Multiplicación de matrices
Matrices y Sistemas de ecuaciones e inecuaciones
Diapositiva 1
Coordenadas cromaticas
Matrices(Arreglos Bidimensionales)
Diapositiva 1 - Colombia Aprende
1995 - Santillana
Diapositiva 1
matematicaslasveredillas.wikispaces.com
TRANSFORMACIONES DE FUNCIONES
MATRICES
MATRICES - Inicio - rosembergs jimdo page!
Presentación de PowerPoint - Urmate
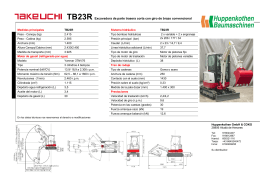
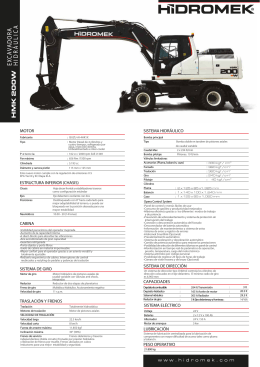
Características técnicas
Diapositiva 1
Aplicaciones de las matrices.