☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
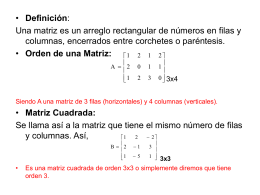
MATRICES
1ª APLICACIÓN. MATRIZ DE ANSOFF La matriz de Ansoff, también
Diapositiva 1
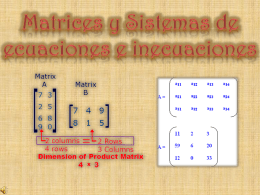
Matrices y Sistemas de ecuaciones e inecuaciones
Diapositiva 1
Diapositiva 1 - Colombia Aprende
Diapositiva 1
matematicaslasveredillas.wikispaces.com
Diapositiva 1
TRANSFORMACIONES LINEALES EN 3D
Aplicaciones de las matrices.
Diapositiva 1
método de almacenamiento seguro de sustancias químicas
Introducción a la Química Bioinorgánica:
Diapositiva 1
Diapositiva 1
Multiplicación de matrices, problemas experimentales
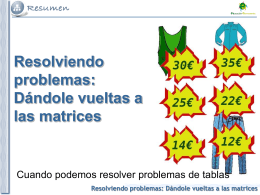
Resumen
MATRICES
Movimientos en el plano
Resta de matrices
Sistema de valores y vectores propios de una matriz
Presentación en PowerPoint