☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Descarga - Física General
dinamicavx
Presentación de PowerPoint
presentación
Diapositiva 1
Aplicación de los sólidos de revolución
Document
Unidad 2:Estática del Cuerpo Rígido
Dinamica - ies la patacona
BALON_FUTBOL_AMERICANO
MOMENTOS DE INERECIA
Document
dispositivo de movimiento residual o de inercia
Métodos Gravimetricos
Estados de la materia
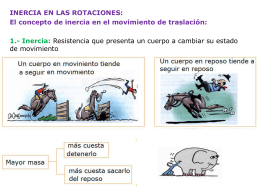
tippens inercia de las rotaciones
Sólido
nica Momento inercia
Momento angular de una partícula
1/46124_180114_presentación
Slide 1 - ohm tekmin
Descarga
Versión PowerPoint