☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Power Palanca
folleto dtt - Universidad de Santiago
VERóNICA NOVOA C. Profesional con más de treinta años de
Diapositiva 1
Diapositiva 1 - Universidad de Santiago
programas de postgrado - Universidad Tecnológica de Panamá
curriculum institucional - SDT Sociedad de Desarrollo Tecnológico
Diapositiva 1 - Direcciones General de Comunicaciones y Asuntos
CALOR Y TEMPERATURA - Educación Continua 2007
Diapositiva 1
maquinas-y-herramientas1
PALANCA
Movimiento relativo de la Tierra
Palancas de Control Robert Simons Harvard Business School
Los niños de Aprendizaje lento y el decreto 170 Dr. Mario Morales N
MOVIMIENTO Y POSTURA MOVIMIENTOS - E
Mecanismos Simples[1]. - educacion-tecnologica
Paradigmas y Enfoques en Rehabilitación
PALANCAS MUSCULARES - IHMC Public Cmaps (3)
presentación Cerveza Imperial
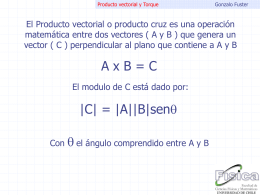
Regla de la mano derecha
Tema 1 Accionamientos Eléctricos - OCW



![Mecanismos Simples[1]. - educacion-tecnologica](http://s1.slideshowes.com/store/data/000030321_1-741c5fb1bc7017d9fae49ce0796df2c2-260x520.png)