☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Integración Numérica
transparencias
Integración Numérica
Document
Un intervalo de 95% de confianza para la diferencia de las medias
Intervalos de Confianza
un estudio estadístico comprende los siguientes pasos
Descargar
Integración Numérica
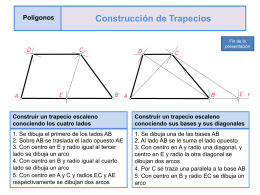
1. Construccion Trapecios
tiempo partido - Club del arbitro
Separación de raíces
Presentación de PowerPoint
File - albeiro vergara urango
Aproximacion de Funciones
Expresiones Algebraicas