☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
GEOMETRIA DE FIGURAS
Relaciones y Funciones - Guias
Diapositiva 1
Ecuaciones
Document
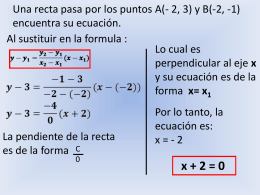
Una recta pasa por los puntos A(- 2, 3) y B(-2,
La Materia y sus transformaciones
Tema: Ecuaciones de Primer Grado
Document
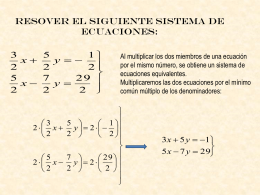
RESOVER EL SIGUIENTE SISTEMA DE ECUACIONES
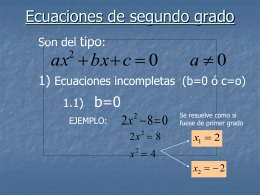
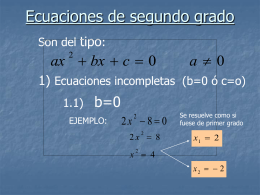
Ecuaciones de segundo grado en una variable