☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Diseño de brazo robotico
Yo - stacisohn
Brazo robot
Diapositiva 1
MORALEJA DEL SOLDADO
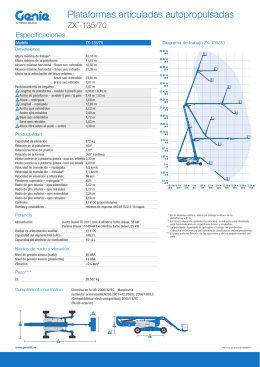
Hoja de datos técnicos
Plataformas articuladas autopropulsadas
Oferta Por Tiempo Limitado Plan A: Promocion LOI Compra 3 y
Presentación de PowerPoint
QUIMICA
rehabilitación del trauma raquimedular
ESTIRAMIENTOS (PARTE II)
Brazo y Codo - Telmeds.org
Diapositiva 1
UN ACCIDENTE – UNA SOLUCION-jueves21nov
KIT ADELGAZANTE - Funat productos naturales Colombia
Prótesis Robóticas
PATOLOGIAS DE HOMBRO
PALANCAS MUSCULARES - IHMC Public Cmaps (3)
EFICACIA DE TRES ESQUEMAS DIFERENTES DE …
Diapositiva 1 - Cruz Roja
grafica caja brazos
NATACIÓN: “LA ESPALDA”