☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Presentación en PowerPoint
Descarga
Cálculo d ela orientación geográfica del Esfuerzo de cizalla resuelto
ESPACIO VECTORIAL EUCLÍDEO
V - senalesjaveriana
Document
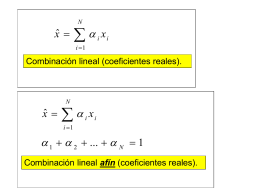
combinaciones lineales convexas
Vectores en el Espacio
El Campamento de Verano de Komoroskiii
Sistema de valores y vectores propios de una matriz
Presentación de Flujo Eléctrico en
Expectativas - What is the ICPS?
Ecuaciones del plano