☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Respuesta de un Sistema Discreto por Transformada Z
Sistemas Descritos por Ecuaciones en Diferencias
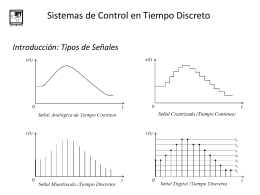
Sistemas de Control en Tiempo Discreto
El Cazo de Lorenzo
Sistemas de segundo orden
Document
Sistemas de primer orden
TEMA 3
Diagramas de Bode
Protocolo personal asistencial
Ingeniería en Sistemas de Información