☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Técnicas de control de helicópteros a escala
Project Overview
FRANCISCO JAVIER – Helicoperos a radio control
presentación
La industria aeroespacial
Instructor Líder: Capitán Javier Velasco Espinoza
LA INDUSTRIA AEROESPACIAL. IV.5.
Diapositiva 1
Diapositiva 1
AUTONOMÍA Y NORMAS DE CONDUCTA
TALLER HTML5 04
FAASApresentacion
El milagro de los Andes
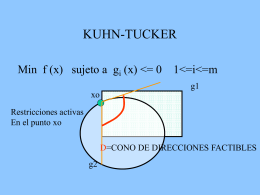
KUHN-TUCKER
recambio de balizas de hilo de guardia con tensión en linea
RobotBailon_2-4
Métodos iterativos para sistemas de ecuaciones lineales
Guia Docente - Redes de Aprendizaje