☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
KUHN-TUCKER
Document
El trabajo infantil en cifras En los últimos tres
Diapositiva 1
Diapositiva 1 - IHMC Public Cmaps
Vacaciones en el Cono Sur
Diapositiva 1
Diapositiva 1
Diapositiva 1
Gravedades f(R)
Descarga
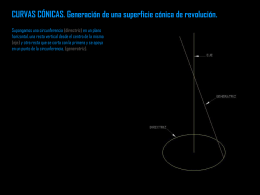
Cuerpos geométricos
Impacto de la Intensificación Productiva sobre el Campo Natural en
Escuela de Familias ¿Cómo puedo ayudar a mi
Internacional de Servicios Públicos para el Cono Sur
Las Nuevas Políticas Activas de Empleo y Formación del SCE
Diapositiva 1
cuerpos_rev
PRUEBAS FISICAS ARBITROS FUTSAL
Perspectives on the EU Sustainable Development Policy
Dibujar planta, alzado y perfil de la pieza dada
Tendencias de Bases de Datos
PROCISUR Programa Cooperativo para el Desarrollo