☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Métodos iterativos para sistemas de ecuaciones lineales
transparencias
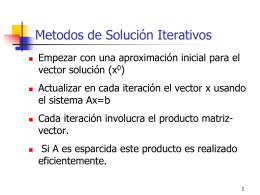
Métodos iterativos para sistemas lineales
Algoritmo Probabilisticos
Herramientas de Ingeniería Industrial
Introduction to Matlab
Sistema de Ecuaciones Lineales Metodos Iterativos
La enseñanza y entrenamiento de la defensa de la cortina directa
La Capacitación Participativa: Interactiva, Interesante e
RobotBailon_2-4
Document
Sistema de valores y vectores propios de una matriz
Redes neuronales en la inyección de un ciclomotor
INTRODUCCIÓN A MATLAB
Técnicas de control de helicópteros a escala
INTRODUCCIÓN A LA MICROBIOLOGÍA CLÍNICA