☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Búsqueda entre adversarios
Juegos
Slide 1
juegos
Componentes de las actitudes y su proceso de
Curso 2010-2011
Michael Jordan
Comunicaciones convergentes: Ingeniería de tráfico
PROBLEMAS CON EL JUEGO - Oregon Problem Gambling Services
Inteligencia Artificial
max factor
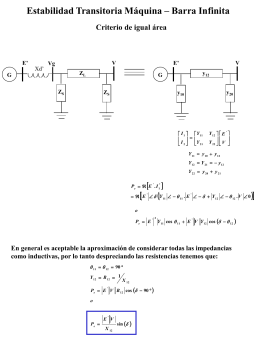
7 Criterio igual área
Búsqueda Informada
JUEGO DE SALÓN
Tiro Parabólico - Gobierno de Canarias
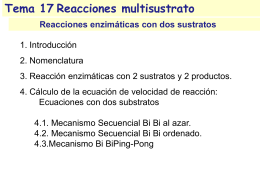
A + B - BioScripts
Diapositiva 1
4.ProblemasResueltos..
MEDICAMENTOS COMUNES EN PEDIATRIA EXTRAHOSPITALARIA
FORESTAL MINICO S.A. - Prácticas de PL en el establecimiento y
PODA_2009_10_20