☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Deportes
Inteligencia Artificial
Cápitulo 6
JUSTIFICACION DE TALLAS Y PODAS
Herramientas de poda
Juegos
Curso 2010-2011
Reflexiones 'Alcanzando lo Mejor'
Cap 6 (ex 5) - r&n - Inteligencia Artificial
Búsqueda entre adversarios
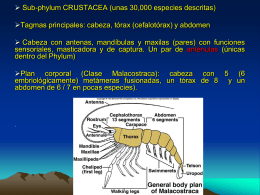
Crustaceos
Presentación de PowerPoint
FORESTAL MINICO S.A. - Prácticas de PL en el establecimiento y
Diapositiva 1