☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Document
fisica clei 5_clase_5
Dimensión institucional - Ministerio de Administración Pública
Método del polígono - Interpretación de fenómenos físicos de la
Descarga
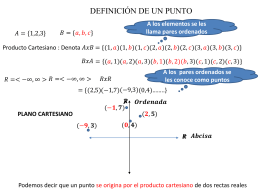
Representación gráfica de vectores
TEMA 9 - matematicasdp
Dirección de Epidemiología y Demografía
Presentación de PowerPoint
Ecuaciones del plano
6_MECANICA_DEL_MEDIO_CONTINUO (Tamaño: 773.54K)
Diapositiva 1