☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Interpolacion Polinomica Segmentaria: Splines
INTERPOLACION POR SPLINE
Interpolacion Polinomica Segmentaria: Splines
Interpolación Polinómica Segmentaria: Splines
Interpolacion Polinomica Segmentaria: Splines
Diapositiva 1 - Universidad de Antofagasta
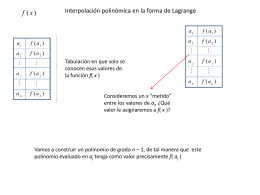
PRÁCTICA 7: Interpolación Polinómica
Diapositiva 1
INTERPOLACION LINEAL
Splines cubicas
cal
Splines Cúbicos
Aproximacion de Funciones
Tema
Diferencias Finitas (Newton Oficial).
Modelos digitales de terreno
INTERPOLACIÓN
Interpolacion lineal y cuadratica
Diapositiva 1
Interpolacion
Interpolacion
Flash
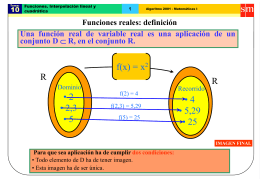
funciones polinominales