☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Robótica Inteligente
Programación en Escalera (Ladder)
ab - Sofoca
Sistemas Lineales y Simulación (SLS5201)
Día Mundial Parkinson - Parkinson Bolivia | Página de Inicio
Sensores
Sistemas de Control
SOCIEDADES SIMULADAS y FRAUDULENTAS
SISTEMAS DE CONTROL - Ing. Jorge Cosco Grimaney | …
Capitulo V - RAMOS ON
ROBOT
sys-1
LLUVIA DE IDEAS - Tatiana agudelo
NOT
PPT Pensar sin Estado - Facultad de Trabajo Social
AUTOMATISMOS Y CONTROL
No Slide Title
Descripción de los tipos de proceso
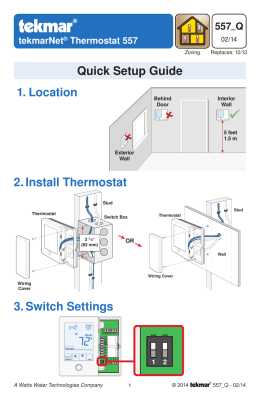
1. Location 2. Install Thermostat 3. Switch Settings Quick Setup Guide
Diapositiva 1
Presentación - Agencia Nacional de Hidrocarburos
AUTOMATISMOS Y CONTROL
Retrato