☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Sensores
Introducción a la Electrónica
ab - Sofoca
Robótica Inteligente
Diodo túnel
Día Mundial Parkinson - Parkinson Bolivia | Página de Inicio
SOCIEDADES SIMULADAS y FRAUDULENTAS
Slide 1
Sistemas Lineales y Simulación (SLS5201)
Elementos activos - I.S.C. 603-B
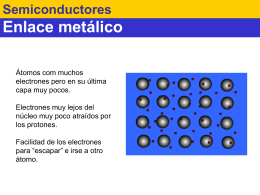
ELECTRONICA BASICA
Antes de salir para el aeropuerto y En el aeropuerto
Diapositiva 1
Slide 1
No Slide Title
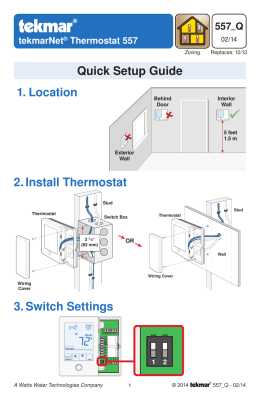
1. Location 2. Install Thermostat 3. Switch Settings Quick Setup Guide
regulador pwr para superstar 3900
Document
PIPER PA-181- EC-DKC - Real Aeroclub Zaragoza
Operating instructions THERMADOR PH48ZS
Memoria Espacio OFF 2011
Manual de instalación motor ARES 1000 kilos
TABLA DE CONTENIDO