☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
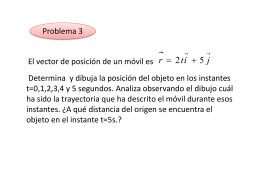
TEMA 7
Vector de posición móvil:
MOVIMIENTO EN DOS DIMENSIONES
fisica clei 5_clase_5
Vectores
Universidad Nacional Autónoma de México Facultad de Ingeniería
Presentación de Flujo Eléctrico en
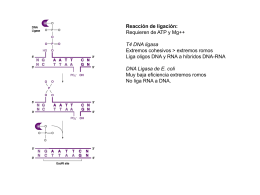
Clase ligación competentes
¿Qué ocurre cuando la velocidad cambia?
Ecuaciones del plano