☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Construcción y control de un brazo accionado por hélices
WS Formatos
Diseño de brazo robotico
Prótesis Robóticas
ITERACIÓN SIMPLE DE PUNTO FIJO
06ControlProcesos
El cuerpo humano, me duele
La mitad de 430 - DIDACTICADELAMATEMATICAMPERO
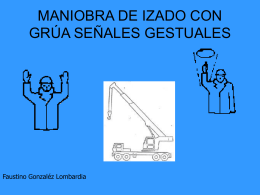
MANIOBRA DE IZADO CON GRUA SEÑALES GESTUALES
Cabeza, Hombros, Rodillas y Pies La Prueba: El Cuerpo
Sistemas de segundo orden
Señales ()
Diapositiva 1
Procesos
historia del rock - david