☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Geoestadística Multivariada
Kriging Simple
CADENAS PRODUCTIVAS
Descargar
lineas-de-espera
09_Diseno_Experimento
Riesgo y rendimiento.
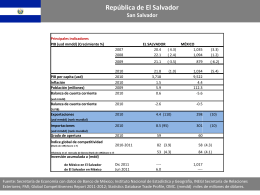
El Salvador - Secretaría de Economía
Rendimiento - Riesgo
Elementos básicos de probabilidad y estadística
CURSO DE VARIOGRAMA