☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Introducción a los sistemas de control
La Tarjeta de Crédito
control de procesos
FICHA TÉCNICA
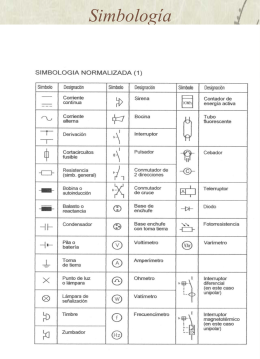
Simbología y esquemas.
Slide 1
Descargar en PPT
diapositiva 5.1
El monitor automático de sistemas y servicios
Introducción a los sistemas de control
Introducción a las Ingenierías de la Información
Cajero Automatico PPT
APRENDIZAJE AUTOMATICO
Descargar Presentación Powerpoint
Sector Siderúrgico: Aviso Automático y Certificado de Molino
PPT Pensar sin Estado - Facultad de Trabajo Social
En el aeropuerto
sys-1
Inversión Privada, Concesiones y Regulación
"Eres importante para mí".
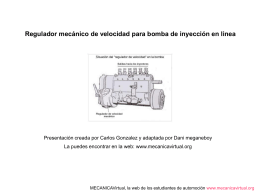
Regulador de velocidad - Aficionados a la Mecánica
Presentaci n PFC Juan Carmona_vFINAL
ANCORA: Una forma diferente de Aprender y de Enseñar