☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Diapositiva 1 - Erwin Ried's Repository
resolución de ejercicios
Diapositiva 1 - Universidad de Antofagasta
MÁQUINAS. CONCEPTOS
Tema: 1.2.1 Determinación de circuitos eléctricos
Circuito en Serie. Ley de watt.
Seismology – G-GAP
Diapositiva 1
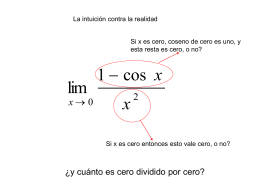
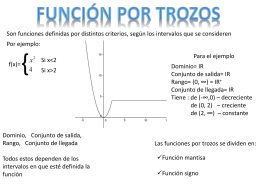
Función por trozos
Métodos de Integración
Diapositiva 1