☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
UNIDAD III final de control
UNIDAD III 3.- ACTUADORES Un actuador es un dispositivo
Diapositiva 1
Modelado de un tanque de nivel
DIMENSIONAMIENTO DE DIAMETROS DE TUBERIA
Descarga
INSTALACIONES DE CALEFACCION POR SUELO RADIANTE
Descargar
Circulación menor y mayor
Válvula en Y
clase 3 parte 2
The Armstrong TVS-4000 Trap Valve Station
PNEUMATIC SYSTEM - ramos on
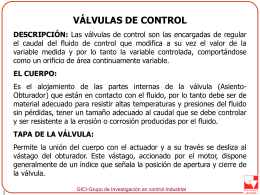
Válvulas - IES Can Mas
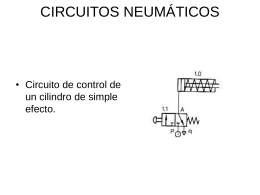
CIRCUITOS NEUMÁTICOS
Descarga
SISTEMA DE OXIGENO
CLASIFICACION DE LOS INSTRUMENTOS INDUSTRIALES
OxiGas unidad 2
Sistema de control de emisiones
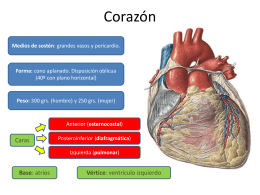
ANATOMÍA DEL CORAZÓN.
Asahi/América Actuadores Eléctricos Serie 92 Características Únicas
paredes