☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
CONTROL AVANZADO - Ing. Jorge Cosco Grimaney
ciclo de vida
Programación por capas Capa de Clases
Experiencia de Aprendiz
Introducción a los sistemas de control
Diapositiva 1
Dispositivos de Entrada/Salida
Diapositiva 1
Sistemas de Control
Variable Controlada - CONTROL DE PROCESOS QUIMICOS
TEMA 7: Gestión de Entrada/Salida
entrada / salida
ESTILOS DE CONTROL
Buenas Tardes!
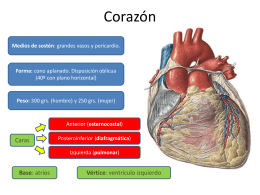
Circulación menor y mayor
Presentación PowerPoint
UNIDAD III final de control
Reglas de Ziegler-Nichols para sintonizar controladores PID
Formacion_Especifica_Tarea_ISE6_3_1
Propuesta 1. Normalización de unidades de aprendizaje