☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Document
CANTIDADES VECTORIALES Y ESCALARES
ECUACIONES
Document
Presentación de PowerPoint
grados de libertad - Máster Sergio J. Navarro Hudiel
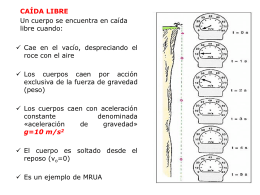
caída libre
Matemáticas que hacen olas
CLASE 4(Movimientos verticales y relativos)
PROCESAMIENTO DE SEÑALES
Álgebra_ecuaciones 1º GRADO
Diapositiva 1