☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Ecuaciones en Derivadas parciales
El Cazo de Lorenzo
Sistemas continuos
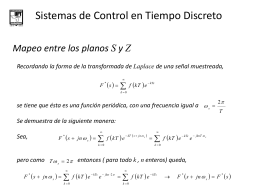
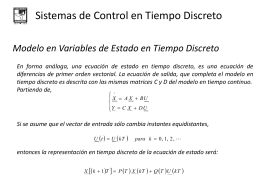
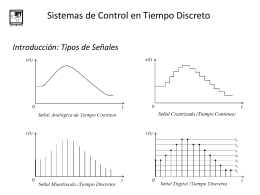
Sistemas de Control en Tiempo Discreto
Conceptos y relaciones de los términos Educación
Gracias, Señor, gracias
Sistemas de Control en Tiempo Discreto
Sistemas de Control en Tiempo Discreto
Protocolo personal asistencial
PLE clase: Dual Simplex Canalizado, Pos