☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Sistemas continuos
sistemas en tiempo discreto
Energía y de potencia de la señales
REvista
Convolución discreta (applet de Arizona State University)
Sistemas continuos
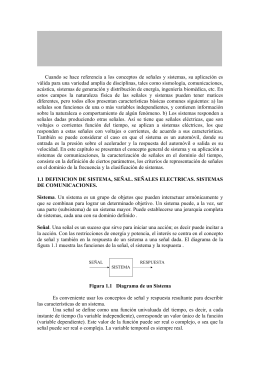
1 Conceptos Básicos de Señales y Sistemas
Control Digital
Control Digital
El Cazo de Lorenzo
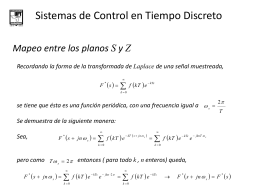
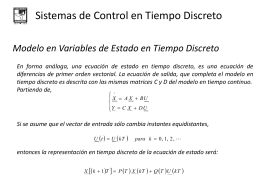
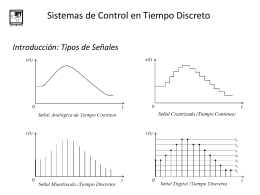
Sistemas de Control en Tiempo Discreto
Sistemas de Control en Tiempo Discreto
Document
Gracias, Señor, gracias
Círculo de Mohr - Centro de Geociencias ::.. UNAM
matediscreta.files.wordpress.com
Sistemas de Control en Tiempo Discreto
Protocolo personal asistencial
Ecuaciones en Derivadas parciales