☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
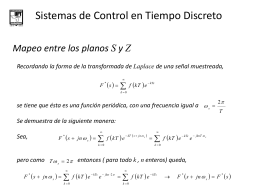
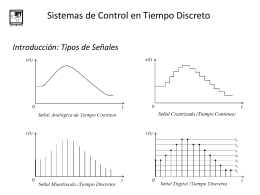
Sistemas de Control en Tiempo Discreto
El Cazo de Lorenzo
Sistemas de Control en Tiempo Discreto
sistemas en tiempo discreto
Sistemas de Control en Tiempo Discreto
Protocolo personal asistencial
Cuestiones tema 2
clase17 - departamento de procesamiento de señales
Vector de posición móvil:
ppt
7 Movimientos en caída libre y resistencia al viento
Descarga
Protocolo auxiliares de enfermería
Ecuaciones en Derivadas parciales